DESCRIPTION
|
Symptôme | Zone suspectée |
|---|---|
|
Il y a des ECU ou capteurs qui affichent un arrêt de communication sur l'écran de diagnostic du bus. Or, il y a des ECU ou capteurs qui affichent un historique d'arrêt de la communication sur l'écran "Detail". |
|
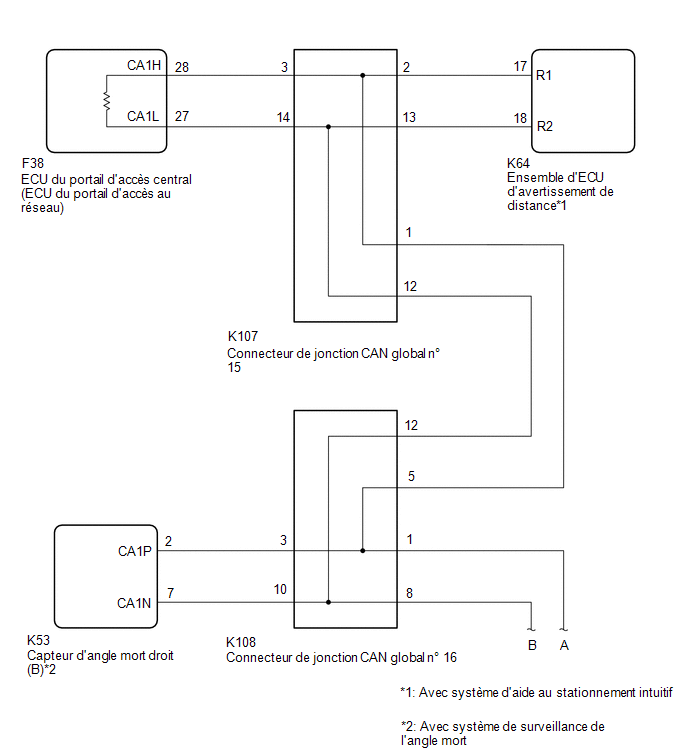
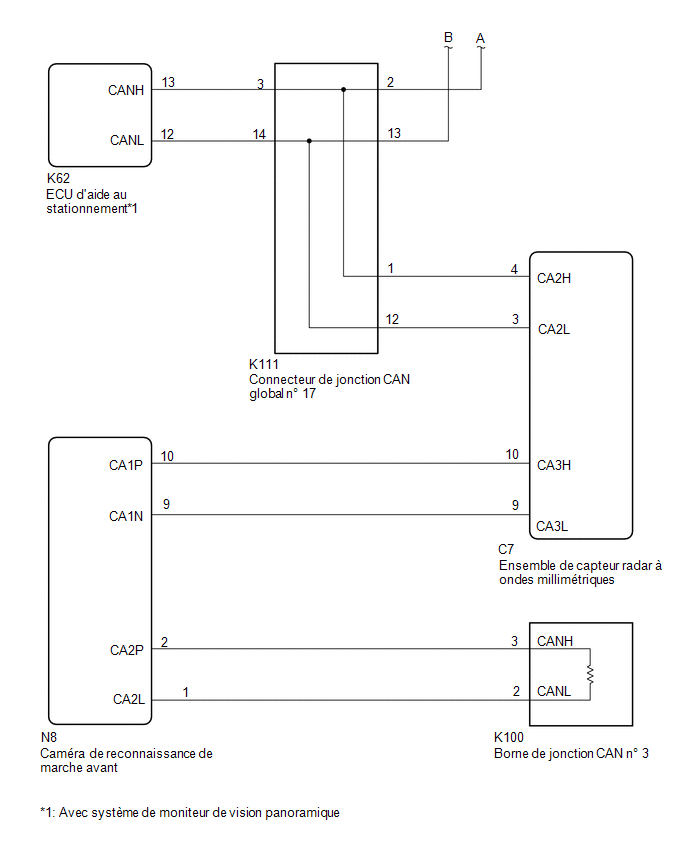
SCHEMA DE CABLAGE
MESURE DE PRECAUTION / REMARQUE / CONSEIL
ATTENTION:
Lors de la période test de confirmation, respecter toutes les limitations de vitesse et le code de la route.
REMARQUE:
Cliquer ici .gif)
Cliquer ici
CONSEIL:
En cas de débranchement et rebranchement de la batterie auxiliaire, une fonction d'apprentissage automatique termine l'apprentissage lorsque le système respectif est utilisé.
Cliquer ici
Cliquer ici
Procédure de vérification DTC: mettre le contacteur d'allumage sur ON et attendre 1 minute ou plus. Puis faire fonctionner le système incriminé potentiel et conduire le véhicule à une vitesse minimum de 60 km/h (37 mi/h) pendant 5 minutes minimum.
Cliquer ici
CONSEIL:
PROCÉDURE
|
1. | RECHERCHER UNE EVENTUELLE COUPURE DANS LES LIGNES DE BUS PRINCIPAL CAN |
(a) Débrancher le câble de la borne négative (-) de la batterie auxiliaire.
| (b) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous. Résistance standard: Cliquer sur Location & Routing(F38) Cliquer sur Location & Routing(F38) Cliquer sur Connector(F38) Cliquer sur Connector(F38)
|
|
| NON OK | .gif) | PASSER AU POINT 68 |
|
| 2. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT DANS LES LIGNES DE BUS CAN |
| (a) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous. Résistance standard: Cliquer sur Location & Routing(F38) Cliquer sur Location & Routing(F38) Cliquer sur Connector(F38) Cliquer sur Connector(F38)
|
|
| NON OK | | PASSER AU POINT 47 |
|
| 3. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT EN +B DANS LA LIGNE DE BUS CAN |
(a) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
|
*1 | DLC3 |
- | - |
|
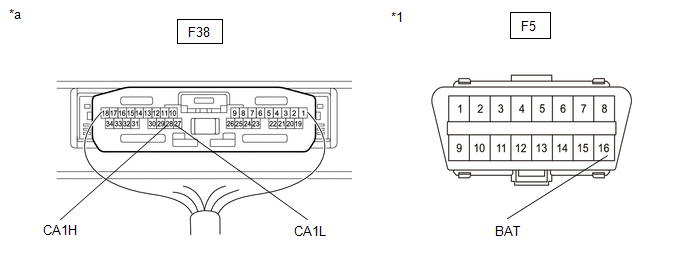
*a | Pièce constitutive avec faisceau de câbles branché (ECU du portail d'accès central (ECU du portail d'accès au réseau)) |
- | - |
Résistance standard:
Cliquer sur Location & Routing(F38,F5) Cliquer sur Location & Routing(F38,F5) Cliquer sur Connector(F38) Cliquer sur Connector(F38) Cliquer sur Connector(F5) Cliquer sur Connector(F5)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
F38-28 (CA1H) - F5-16 (BAT) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
6 kΩ ou plus |
|
F38-27 (CA1L) - F5-16 (BAT) |
| NON OK | | PASSER AU POINT 26 |
|
| 4. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT A GND DANS LA LIGNE DE BUS CAN |
(a) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
|
*1 | DLC3 |
- | - |
|
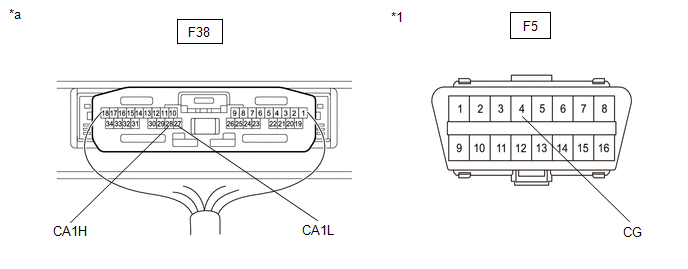
*a | Pièce constitutive avec faisceau de câbles branché (ECU du portail d'accès central (ECU du portail d'accès au réseau)) |
- | - |
Résistance standard:
Cliquer sur Location & Routing(F38,F5) Cliquer sur Location & Routing(F38,F5) Cliquer sur Connector(F38) Cliquer sur Connector(F38) Cliquer sur Connector(F5) Cliquer sur Connector(F5)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
F38-28 (CA1H) - F5-4 (CG) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
200 Ω minimum |
|
F38-27 (CA1L) - F5-4 (CG) |
| OK. | | REMPLACER L'ECU DU PORTAIL D'ACCES CENTRAL [ECU DU PORTAIL D'ACCES AU RESEAU] |
|
| 5. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT A LA MASSE DANS LA LIGNE DE BUS CAN (CONNECTEUR DE JONCTION CAN GLOBAL N° 15 - ECU DU PORTAIL D'ACCES CENTRAL (ECU DU PORTAIL D'ACCES AU RESEAU)) |
(a) Débrancher le connecteur K107 de jonction CAN global n° 15.
(b) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(K107,F5) Cliquer sur Location & Routing(K107,F5) Cliquer sur Connector(K107) Cliquer sur Connector(K107) Cliquer sur Connector(F5) Cliquer sur Connector(F5)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
K107-3 (CANH) - F5-4 (CG) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
200 Ω minimum |
|
K107-14 (CANL) - F5-4 (CG) |
| NON OK | | PASSER AU POINT 9 |
|
| 6. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT A LA MASSE DANS LA LIGNE DE BUS CAN (CONNECTEUR DE JONCTION CAN GLOBAL N° 15 - CONNECTEUR DE JONCTION CAN GLOBAL N° 16) |
(a) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(K107,F5) Cliquer sur Location & Routing(K107,F5) Cliquer sur Connector(K107) Cliquer sur Connector(K107) Cliquer sur Connector(F5) Cliquer sur Connector(F5)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
K107-1 (CANH) - F5-4 (CG) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
200 Ω minimum |
|
K107-12 (CANL) - F5-4 (CG) |
| NON OK | | PASSER AU POINT 11 |
|
| 7. |
VERIFIER LE TYPE DE VEHICULE |
(a) Vérifier le type de véhicule.
Résultat:
|
Résultat | Passer au point |
|---|---|
|
Avec système d'aide au stationnement intuitif |
A |
| Sans système d'aide au stationnement intuitif |
B |
| B |
| REMPLACER LE CONNECTEUR DE JONCTION CAN GLOBAL N° 15 |
|
| 8. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT A LA MASSE DANS LA LIGNE DE BUS CAN (CONNECTEUR DE JONCTION CAN GLOBAL N° 15 - ENSEMBLE D'ECU D'AVERTISSEMENT DE DISTANCE) |
(a) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(K107,F5) Cliquer sur Location & Routing(K107,F5) Cliquer sur Connector(K107) Cliquer sur Connector(K107) Cliquer sur Connector(F5) Cliquer sur Connector(F5)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
K107-2 (CANH) - F5-4 (CG) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
200 Ω minimum |
|
K107-13 (CANL) - F5-4 (CG) |
| OK. | | REMPLACER LE CONNECTEUR DE JONCTION CAN GLOBAL N° 15 |
| NON OK | | PASSER AU POINT 10 |
| 9. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT A LA MASSE DANS LA LIGNE DE BUS CAN (CONNECTEUR DE JONCTION CAN GLOBAL N° 15 - ECU DU PORTAIL D'ACCES CENTRAL (ECU DU PORTAIL D'ACCES AU RESEAU)) |
(a) Débrancher le connecteur F38 de l'ECU du portail d'accès central (ECU du portail d'accès au réseau).
(b) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(K107,F5) Cliquer sur Location & Routing(K107,F5) Cliquer sur Connector(K107) Cliquer sur Connector(K107) Cliquer sur Connector(F5) Cliquer sur Connector(F5)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
K107-3 (CANH) - F5-4 (CG) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
200 Ω minimum |
|
K107-14 (CANL) - F5-4 (CG) |
| OK. | | REMPLACER L'ECU DU PORTAIL D'ACCES CENTRAL [ECU DU PORTAIL D'ACCES AU RESEAU] |
| NON OK | | REPARER OU REMPLACER LA LIGNE PRINCIPALE DE BUS CAN OU LE CONNECTEUR (CONNECTEUR DE JONCTION CAN GLOBAL Nº 15 - ECU DU PORTAIL D'ACCES CENTRAL (ECU DU PORTAIL D'ACCES AU RESEAU)) |
| 10. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT A LA MASSE DANS LA LIGNE DE BUS CAN (CONNECTEUR DE JONCTION CAN GLOBAL N° 15 - ENSEMBLE D'ECU D'AVERTISSEMENT DE DISTANCE) |
(a) Débrancher le connecteur K64 de l'ensemble d'ECU d'avertissement de distance
(b) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(K107,F5) Cliquer sur Location & Routing(K107,F5) Cliquer sur Connector(K107) Cliquer sur Connector(K107) Cliquer sur Connector(F5) Cliquer sur Connector(F5)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
K107-2 (CANH) - F5-4 (CG) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
200 Ω minimum |
|
K107-13 (CANL) - F5-4 (CG) |
| OK. | | REMPLACER L'ENSEMBLE D'ECU D'AVERTISSEMENT DE DISTANCE |
| NON OK | | REPARER OU REMPLACER LA LIGNE SECONDAIRE CAN OU LE CONNECTEUR (CONNECTEUR DE JONCTION CAN GLOBAL N° 15 - ENSEMBLE D'ECU D'AVERTISSEMENT DE DISTANCE) |
| 11. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT A LA MASSE DANS LA LIGNE DE BUS CAN (CONNECTEUR DE JONCTION CAN GLOBAL N° 16 - CONNECTEUR DE JONCTION CAN GLOBAL N° 15) |
(a) Débrancher le connecteur K108 de jonction CAN global n° 16.
(b) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(K108,F5) Cliquer sur Location & Routing(K108,F5) Cliquer sur Connector(K108) Cliquer sur Connector(K108) Cliquer sur Connector(F5) Cliquer sur Connector(F5)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
K108-5 (CANH) - F5-4 (CG) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
200 Ω minimum |
|
K108-12 (CANL) - F5-4 (CG) |
| NON OK | | REPARER OU REMPLACER LA LIGNE PRINCIPALE DE BUS CAN OU LE CONNECTEUR (CONNECTEUR DE JONCTION CAN GLOBAL N° 16 - CONNECTEUR DE JONCTION CAN GLOBAL Nº 15) |
|
| 12. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT A LA MASSE DANS LA LIGNE DE BUS CAN (CONNECTEUR DE JONCTION CAN GLOBAL N° 16 - CONNECTEUR DE JONCTION CAN GLOBAL N° 17) |
(a) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(K108,F5) Cliquer sur Location & Routing(K108,F5) Cliquer sur Connector(K108) Cliquer sur Connector(K108) Cliquer sur Connector(F5) Cliquer sur Connector(F5)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
K108-1 (CANH) - F5-4 (CG) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
200 Ω minimum |
|
K108-8 (CANL) - F5-4 (CG) |
| NON OK | | PASSER AU POINT 16 |
|
| 13. |
VERIFIER LE TYPE DE VEHICULE |
(a) Vérifier le type de véhicule.
Résultat:
|
Résultat | Passer au point |
|---|---|
|
Avec système de moniteur d'angle mort |
A |
| Sans système de moniteur d'angle mort |
B |
| B |
| REMPLACER LE CONNECTEUR DE JONCTION CAN GLOBAL N° 16 |
|
| 14. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT A LA MASSE DANS LA LIGNE DE BUS CAN (CONNECTEUR DE JONCTION CAN GLOBAL N° 16 - CAPTEUR DE MONITEUR D'ANGLE MORT DROIT (B)) |
(a) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(K108,F5) Cliquer sur Location & Routing(K108,F5) Cliquer sur Connector(K108) Cliquer sur Connector(K108) Cliquer sur Connector(F5) Cliquer sur Connector(F5)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
K108-3 (CANH) - F5-4 (CG) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
200 Ω minimum |
|
K108-10 (CANL) - F5-4 (CG) |
| OK. | | REMPLACER LE CONNECTEUR DE JONCTION CAN GLOBAL N° 16 |
|
| 15. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT A LA MASSE DANS LA LIGNE DE BUS CAN (CONNECTEUR DE JONCTION CAN GLOBAL N° 16 - CAPTEUR DE MONITEUR D'ANGLE MORT DROIT (B)) |
(a) Débrancher le connecteur K53 du capteur de moniteur d'angle mort droit.
(b) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(K108,F5) Cliquer sur Location & Routing(K108,F5) Cliquer sur Connector(K108) Cliquer sur Connector(K108) Cliquer sur Connector(F5) Cliquer sur Connector(F5)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
K108-3 (CANH) - F5-4 (CG) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
200 Ω minimum |
|
K108-10 (CANL) - F5-4 (CG) |
| OK. | | REMPLACER LE CAPTEUR DE MONITEUR D'ANGLE MORT DROIT (B) |
| NON OK | | REPARER OU REMPLACER LA LIGNE SECONDAIRE CAN OU LE CONNECTEUR (CONNECTEUR DE JONCTION CAN GLOBAL N° 16 - CAPTEUR DE MONITEUR D'ANGLE MORT DROIT (B)) |
| 16. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT A LA MASSE DANS LA LIGNE DE BUS CAN (CONNECTEUR DE JONCTION CAN GLOBAL N° 17 - CONNECTEUR DE JONCTION CAN GLOBAL N° 16) |
(a) Débrancher le connecteur K111 de jonction CAN global n° 17.
(b) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(K111,F5) Cliquer sur Location & Routing(K111,F5) Cliquer sur Connector(K111) Cliquer sur Connector(K111) Cliquer sur Connector(F5) Cliquer sur Connector(F5)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
K111-2 (CANH) - F5-4 (CG) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
200 Ω minimum |
|
K111-13 (CANL) - F5-4 (CG) |
| NON OK | | REPARER OU REMPLACER LA LIGNE PRINCIPALE DE BUS CAN OU LE CONNECTEUR (CONNECTEUR DE JONCTION CAN GLOBAL N° 17 - CONNECTEUR DE JONCTION CAN GLOBAL Nº 16) |
|
| 17. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT A LA MASSE DANS LA LIGNE DE BUS CAN (CONNECTEUR DE JONCTION CAN GLOBAL N° 17 - ENSEMBLE DE CAPTEUR RADAR A ONDES MILLIMETRIQUES) |
(a) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(K111,F5) Cliquer sur Location & Routing(K111,F5) Cliquer sur Connector(K111) Cliquer sur Connector(K111) Cliquer sur Connector(F5) Cliquer sur Connector(F5)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
K111-1 (CANH) - F5-4 (CG) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
200 Ω minimum |
|
K111-12 (CANL) - F5-4 (CG) |
| NON OK | | PASSER AU POINT 21 |
|
| 18. |
VERIFIER LE TYPE DE VEHICULE |
(a) Vérifier le type de véhicule.
Résultat:
|
Résultat | Passer au point |
|---|---|
|
Avec système de moniteur de vision panoramique |
A |
| Sans système de moniteur de rétroviseur panoramique |
B |
| B |
| REMPLACER LE CONNECTEUR DE JONCTION CAN GLOBAL N° 17 |
|
| 19. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT A LA MASSE DANS LA LIGNE DE BUS CAN (CONNECTEUR DE JONCTION CAN GLOBAL N° 17 - ECU D'AIDE AU STATIONNEMENT) |
(a) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(K111,F5) Cliquer sur Location & Routing(K111,F5) Cliquer sur Connector(K111) Cliquer sur Connector(K111) Cliquer sur Connector(F5) Cliquer sur Connector(F5)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
K111-3 (CANH) - F5-4 (CG) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
200 Ω minimum |
|
K111-14 (CANL) - F5-4 (CG) |
| OK. | | REMPLACER LE CONNECTEUR DE JONCTION CAN GLOBAL N° 17 |
|
| 20. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT A LA MASSE DANS LA LIGNE DE BUS CAN (CONNECTEUR DE JONCTION CAN GLOBAL N° 17 - ECU D'AIDE AU STATIONNEMENT) |
(a) Débrancher le connecteur K62 de l'ECU d'aide au stationnement.
(b) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(K111,F5) Cliquer sur Location & Routing(K111,F5) Cliquer sur Connector(K111) Cliquer sur Connector(K111) Cliquer sur Connector(F5) Cliquer sur Connector(F5)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
K111-3 (CANH) - F5-4 (CG) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
200 Ω minimum |
|
K111-14 (CANL) - F5-4 (CG) |
| OK. | | REMPLACER L'ECU D'AIDE AU STATIONNEMENT |
| NON OK | | REPARER OU REMPLACER LA LIGNE SECONDAIRE CAN OU LE CONNECTEUR (CONNECTEUR DE JONCTION CAN GLOBAL N° 17 - ECU D'AIDE AU STATIONNEMENT) |
| 21. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT A LA MASSE DANS LA LIGNE DE BUS CAN (ENSEMBLE DE CAPTEUR RADAR A ONDES MILLIMETRIQUES - CONNECTEUR DE JONCTION CAN GLOBAL N° 17) |
(a) Débrancher le connecteur K111 de jonction CAN global n° 17.
(b) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(C7,F5) Cliquer sur Location & Routing(C7,F5) Cliquer sur Connector(C7) Cliquer sur Connector(C7) Cliquer sur Connector(F5) Cliquer sur Connector(F5)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
C7-4 (CA2H) - F5-4 (CG) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
200 Ω minimum |
|
C7-3 (CA2L) - F5-4 (CG) |
| NON OK | | REPARER OU REMPLACER LA LIGNE PRINCIPALE DE BUS CAN OU LE CONNECTEUR (ENSEMBLE DE CAPTEUR RADAR A ONDES MILLIMETRIQUES - CONNECTEUR DE JONCTION CAN GLOBAL N° 17) |
|
| 22. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT A LA MASSE DANS LA LIGNE DE BUS CAN (ENSEMBLE DE CAPTEUR RADAR A ONDES MILLIMETRIQUES - CAMERA DE RECONNAISSANCE DE ZONE AVANT) |
(a) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(C7,F5) Cliquer sur Location & Routing(C7,F5) Cliquer sur Connector(C7) Cliquer sur Connector(C7) Cliquer sur Connector(F5) Cliquer sur Connector(F5)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
C7-10 (CA3H) - F5-4 (CG) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
200 Ω minimum |
|
C7-9 (CA3L) - F5-4 (CG) |
| OK. | | REMPLACER L'ENSEMBLE DE CAPTEUR RADAR A ONDES MILLIMETRIQUES |
|
| 23. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT A LA MASSE DANS LA LIGNE DE BUS CAN (CAMERA DE RECONNAISSANCE DE ZONE AVANT - ENSEMBLE DE CAPTEUR RADAR A ONDES MILLIMETRIQUES) |
(a) Débrancher le connecteur N8 de la caméra de reconnaissance de marche avant.
(b) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(N8,F5) Cliquer sur Location & Routing(N8,F5) Cliquer sur Connector(N8) Cliquer sur Connector(N8) Cliquer sur Connector(F5) Cliquer sur Connector(F5)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
N8-10 (CA1P) - F5-4 (CG) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
200 Ω minimum |
|
N8-9 (CA1N) - F5-4 (CG) |
| NON OK | | REPARER OU REMPLACER LA LIGNE PRINCIPALE DE BUS CAN OU LE CONNECTEUR (ENSEMBLE DE CAPTEUR RADAR A ONDES MILLIMETRIQUES - CONNECTEUR DE JONCTION CAN GLOBAL N° 17) |
|
| 24. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT A LA MASSE DANS LA LIGNE DE BUS CAN (CAMERA DE RECONNAISSANCE DE MARCHE AVANT - BORNE DE JONCTION CAN N° 3) |
(a) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(N8,F5) Cliquer sur Location & Routing(N8,F5) Cliquer sur Connector(N8) Cliquer sur Connector(N8) Cliquer sur Connector(F5) Cliquer sur Connector(F5)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
N8-2 (CA2P) - F5-4 (CG) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
200 Ω minimum |
|
N8-1 (CA2L) - F5-4 (CG) |
| OK. | | REMPLACER LA CAMERA DE DETECTION AVANT |
|
| 25. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT A LA MASSE DANS LA LIGNE DE BUS CAN (CAMERA DE RECONNAISSANCE DE MARCHE AVANT - BORNE DE JONCTION CAN N° 3) |
(a) Débrancher le connecteur K100 de borne de jonction CAN n° 3.
(b) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(N8,F5) Cliquer sur Location & Routing(N8,F5) Cliquer sur Connector(N8) Cliquer sur Connector(N8) Cliquer sur Connector(F5) Cliquer sur Connector(F5)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
N8-2 (CA2P) - F5-4 (CG) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
200 Ω minimum |
|
N8-1 (CA2L) - F5-4 (CG) |
| OK. | | REMPLACER LA BORNE DE JONCTION CAN N° 3 |
| NON OK | | REPARER OU REMPLACER LA LIGNE PRINCIPALE DE BUS CAN OU LE CONNECTEUR (CAMERA DE RECONNAISSANCE DE MARCHE AVANT - BORNE DE JONCTION CAN N° 3) |
| 26. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT EN +B DANS LA LIGNE DE BUS CAN (CONNECTEUR DE JONCTION CAN GLOBAL N° 15 - ECU DU PORTAIL D'ACCES CENTRAL (ECU DU PORTAIL D'ACCES AU RESEAU)) |
(a) Débrancher le connecteur K107 de jonction CAN global n° 15.
(b) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(K107,F5) Cliquer sur Location & Routing(K107,F5) Cliquer sur Connector(K107) Cliquer sur Connector(K107) Cliquer sur Connector(F5) Cliquer sur Connector(F5)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
K107-3 (CANH) - F5-16 (BAT) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
6 kΩ ou plus |
|
K107-14 (CANL) - F5-16 (BAT) |
| NON OK | | PASSER AU POINT 30 |
|
| 27. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT EN +B DANS LA LIGNE DE BUS CAN (CONNECTEUR DE JONCTION CAN GLOBAL N° 15 - CONNECTEUR DE JONCTION CAN GLOBAL N° 16) |
(a) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(K107,F5) Cliquer sur Location & Routing(K107,F5) Cliquer sur Connector(K107) Cliquer sur Connector(K107) Cliquer sur Connector(F5) Cliquer sur Connector(F5)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
K107-1 (CANH) - F5-16 (BAT) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
6 kΩ ou plus |
|
K107-12 (CANL) - F5-16 (BAT) |
| NON OK | | PASSER AU POINT 32 |
|
| 28. |
VERIFIER LE TYPE DE VEHICULE |
(a) Vérifier le type de véhicule.
Résultat:
|
Résultat | Passer au point |
|---|---|
|
Avec système d'aide au stationnement intuitif |
A |
| Sans système d'aide au stationnement intuitif |
B |
| B |
| REMPLACER LE CONNECTEUR DE JONCTION CAN GLOBAL N° 15 |
|
| 29. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT EN +B DANS LA LIGNE DE BUS CAN (CONNECTEUR DE JONCTION CAN GLOBAL N° 15 - ENSEMBLE D'ECU D'AVERTISSEMENT DE DISTANCE) |
(a) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(K107,F5) Cliquer sur Location & Routing(K107,F5) Cliquer sur Connector(K107) Cliquer sur Connector(K107) Cliquer sur Connector(F5) Cliquer sur Connector(F5)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
K107-2 (CANH) - F5-16 (BAT) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
6 kΩ ou plus |
|
K107-13 (CANL) - F5-16 (BAT) |
| OK. | | REMPLACER LE CONNECTEUR DE JONCTION CAN GLOBAL N° 15 |
| NON OK | | PASSER AU POINT 31 |
| 30. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT EN +B DANS LA LIGNE DE BUS CAN (CONNECTEUR DE JONCTION CAN GLOBAL N° 15 - ECU DU PORTAIL D'ACCES CENTRAL (ECU DU PORTAIL D'ACCES AU RESEAU)) |
(a) Débrancher le connecteur F38 de l'ECU du portail d'accès central (ECU du portail d'accès au réseau).
(b) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(K107,F5) Cliquer sur Location & Routing(K107,F5) Cliquer sur Connector(K107) Cliquer sur Connector(K107) Cliquer sur Connector(F5) Cliquer sur Connector(F5)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
K107-3 (CANH) - F5-16 (BAT) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
6 kΩ ou plus |
|
K107-14 (CANL) - F5-16 (BAT) |
| OK. | | REMPLACER L'ECU DU PORTAIL D'ACCES CENTRAL [ECU DU PORTAIL D'ACCES AU RESEAU] |
| NON OK | | REPARER OU REMPLACER LA LIGNE PRINCIPALE DE BUS CAN OU LE CONNECTEUR (CONNECTEUR DE JONCTION CAN GLOBAL Nº 15 - ECU DU PORTAIL D'ACCES CENTRAL (ECU DU PORTAIL D'ACCES AU RESEAU)) |
| 31. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT EN +B DANS LA LIGNE DE BUS CAN (CONNECTEUR DE JONCTION CAN GLOBAL N° 15 - ENSEMBLE D'ECU D'AVERTISSEMENT DE DISTANCE) |
(a) Débrancher le connecteur K64 de l'ensemble d'ECU d'avertissement de distance.
(b) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(K107,F5) Cliquer sur Location & Routing(K107,F5) Cliquer sur Connector(K107) Cliquer sur Connector(K107) Cliquer sur Connector(F5) Cliquer sur Connector(F5)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
K107-2 (CANH) - F5-16 (BAT) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
6 kΩ ou plus |
|
K107-13 (CANL) - F5-16 (BAT) |
| OK. | | REMPLACER L'ENSEMBLE D'ECU D'AVERTISSEMENT DE DISTANCE |
| NON OK | | REPARER OU REMPLACER LA LIGNE SECONDAIRE CAN OU LE CONNECTEUR (CONNECTEUR DE JONCTION CAN GLOBAL N° 15 - ENSEMBLE D'ECU D'AVERTISSEMENT DE DISTANCE) |
| 32. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT EN +B DANS LA LIGNE DE BUS CAN (CONNECTEUR DE JONCTION CAN GLOBAL N° 16 - CONNECTEUR DE JONCTION CAN GLOBAL N° 15) |
(a) Débrancher le connecteur K108 de jonction CAN global n° 16.
(b) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(K108,F5) Cliquer sur Location & Routing(K108,F5) Cliquer sur Connector(K108) Cliquer sur Connector(K108) Cliquer sur Connector(F5) Cliquer sur Connector(F5)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
K108-5 (CANH) - F5-16 (BAT) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
6 kΩ ou plus |
|
K108-12 (CANL) - F5-16 (BAT) |
| NON OK | | REPARER OU REMPLACER LA LIGNE PRINCIPALE DE BUS CAN OU LE CONNECTEUR (CONNECTEUR DE JONCTION CAN GLOBAL N° 16 - CONNECTEUR DE JONCTION CAN GLOBAL Nº 15) |
|
| 33. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT EN +B DANS LA LIGNE DE BUS CAN (CONNECTEUR DE JONCTION CAN GLOBAL N° 16 - CONNECTEUR DE JONCTION CAN GLOBAL N° 17) |
(a) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(K108,F5) Cliquer sur Location & Routing(K108,F5) Cliquer sur Connector(K108) Cliquer sur Connector(K108) Cliquer sur Connector(F5) Cliquer sur Connector(F5)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
K108-1 (CANH) - F5-16 (BAT) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
6 kΩ ou plus |
|
K108-8 (CANL) - F5-16 (BAT) |
| NON OK | | PASSER AU POINT 37 |
|
| 34. |
VERIFIER LE TYPE DE VEHICULE |
(a) Vérifier le type de véhicule.
Résultat:
|
Résultat | Passer au point |
|---|---|
|
Avec système de moniteur d'angle mort |
A |
| Sans système de moniteur d'angle mort |
B |
| B |
| REMPLACER LE CONNECTEUR DE JONCTION CAN GLOBAL N° 16 |
|
| 35. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT EN +B DANS LA LIGNE DE BUS CAN (CONNECTEUR DE JONCTION CAN GLOBAL N° 16 - CAPTEUR DE MONITEUR D'ANGLE MORT DROIT (B)) |
(a) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(K108,F5) Cliquer sur Location & Routing(K108,F5) Cliquer sur Connector(K108) Cliquer sur Connector(K108) Cliquer sur Connector(F5) Cliquer sur Connector(F5)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
K108-3 (CANH) - F5-16 (BAT) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
6 kΩ ou plus |
|
K108-10 (CANL) - F5-16 (BAT) |
| OK. | | REMPLACER LE CONNECTEUR DE JONCTION CAN GLOBAL N° 16 |
|
| 36. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT EN +B DANS LA LIGNE DE BUS CAN (CONNECTEUR DE JONCTION CAN GLOBAL N° 16 - CAPTEUR DE MONITEUR D'ANGLE MORT DROIT (B)) |
(a) Débrancher le connecteur K53 du capteur de moniteur d'angle mort droit.
(b) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(K108,F5) Cliquer sur Location & Routing(K108,F5) Cliquer sur Connector(K108) Cliquer sur Connector(K108) Cliquer sur Connector(F5) Cliquer sur Connector(F5)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
K108-3 (CANH) - F5-16 (BAT) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
6 kΩ ou plus |
|
K108-10 (CANL) - F5-16 (BAT) |
| OK. | | REMPLACER LE CAPTEUR DE MONITEUR D'ANGLE MORT DROIT (B) |
| NON OK | | REPARER OU REMPLACER LA LIGNE SECONDAIRE CAN OU LE CONNECTEUR (CONNECTEUR DE JONCTION CAN GLOBAL N° 16 - CAPTEUR DE MONITEUR D'ANGLE MORT DROIT (B)) |
| 37. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT EN +B DANS LA LIGNE DE BUS CAN (CONNECTEUR DE JONCTION CAN GLOBAL N° 17 - CONNECTEUR DE JONCTION CAN GLOBAL N° 16) |
(a) Débrancher le connecteur K111 de jonction CAN global n° 17.
(b) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(K111,F5) Cliquer sur Location & Routing(K111,F5) Cliquer sur Connector(K111) Cliquer sur Connector(K111) Cliquer sur Connector(F5) Cliquer sur Connector(F5)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
K111-2 (CANH) - F5-16 (BAT) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
6 kΩ ou plus |
|
K111-13 (CANL) - F5-16 (BAT) |
| NON OK | | REPARER OU REMPLACER LA LIGNE PRINCIPALE DE BUS CAN OU LE CONNECTEUR (CONNECTEUR DE JONCTION CAN GLOBAL N° 17 - CONNECTEUR DE JONCTION CAN GLOBAL Nº 16) |
|
| 38. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT EN +B DANS LA LIGNE DE BUS CAN (CONNECTEUR DE JONCTION CAN GLOBAL N° 17 - ENSEMBLE DE CAPTEUR RADAR A ONDES MILLIMETRIQUES) |
(a) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(K111,F5) Cliquer sur Location & Routing(K111,F5) Cliquer sur Connector(K111) Cliquer sur Connector(K111) Cliquer sur Connector(F5) Cliquer sur Connector(F5)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
K111-1 (CANH) - F5-16 (BAT) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
6 kΩ ou plus |
|
K111-12 (CANL) - F5-16 (BAT) |
| NON OK | | PASSER AU POINT 42 |
|
| 39. |
VERIFIER LE TYPE DE VEHICULE |
(a) Vérifier le type de véhicule.
Résultat:
|
Résultat | Passer au point |
|---|---|
|
Avec système de moniteur de vision panoramique |
A |
| Sans système de moniteur de rétroviseur panoramique |
B |
| B |
| REMPLACER LE CONNECTEUR DE JONCTION CAN GLOBAL N° 17 |
|
| 40. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT EN +B DANS LA LIGNE DE BUS CAN (CONNECTEUR DE JONCTION CAN GLOBAL N° 17 - ECU D'AIDE AU STATIONNEMENT) |
(a) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(K111,F5) Cliquer sur Location & Routing(K111,F5) Cliquer sur Connector(K111) Cliquer sur Connector(K111) Cliquer sur Connector(F5) Cliquer sur Connector(F5)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
K111-3 (CANH) - F5-16 (BAT) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
6 kΩ ou plus |
|
K111-14 (CANL) - F5-16 (BAT) |
| OK. | | REMPLACER LE CONNECTEUR DE JONCTION CAN GLOBAL N° 17 |
|
| 41. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT EN +B DANS LA LIGNE DE BUS CAN (CONNECTEUR DE JONCTION CAN GLOBAL N° 17 - ECU D'AIDE AU STATIONNEMENT) |
(a) Débrancher le connecteur K62 de l'ECU d'aide au stationnement.
(b) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(K111,F5) Cliquer sur Location & Routing(K111,F5) Cliquer sur Connector(K111) Cliquer sur Connector(K111) Cliquer sur Connector(F5) Cliquer sur Connector(F5)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
K111-3 (CANH) - F5-16 (BAT) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
6 kΩ ou plus |
|
K111-14 (CANL) - F5-16 (BAT) |
| OK. | | REMPLACER L'ECU D'AIDE AU STATIONNEMENT |
| NON OK | | REPARER OU REMPLACER LA LIGNE SECONDAIRE CAN OU LE CONNECTEUR (CONNECTEUR DE JONCTION CAN GLOBAL N° 17 - ECU D'AIDE AU STATIONNEMENT) |
| 42. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT EN +B DANS LA LIGNE DE BUS CAN (ENSEMBLE DE CAPTEUR RADAR A ONDES MILLIMETRIQUES - CONNECTEUR DE JONCTION CAN GLOBAL N° 17) |
(a) Débrancher le connecteur C7 de l'ensemble de capteur radar à ondes millimétriques.
(b) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(C7,F5) Cliquer sur Location & Routing(C7,F5) Cliquer sur Connector(C7) Cliquer sur Connector(C7) Cliquer sur Connector(F5) Cliquer sur Connector(F5)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
C7-4 (CA2H) - F5-16 (BAT) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
6 kΩ ou plus |
|
C7-3 (CA2L) - F5-16 (BAT) |
| NON OK | | REPARER OU REMPLACER LA LIGNE PRINCIPALE DE BUS CAN OU LE CONNECTEUR (ENSEMBLE DE CAPTEUR RADAR A ONDES MILLIMETRIQUES - CONNECTEUR DE JONCTION CAN GLOBAL N° 17) |
|
| 43. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT EN +B DANS LA LIGNE DE BUS CAN (ENSEMBLE DE CAPTEUR RADAR A ONDES MILLIMETRIQUES - CAMERA DE RECONNAISSANCE DE MARCHE AVANT) |
(a) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(C7,F5) Cliquer sur Location & Routing(C7,F5) Cliquer sur Connector(C7) Cliquer sur Connector(C7) Cliquer sur Connector(F5) Cliquer sur Connector(F5)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
C7-10 (CA3H) - F5-16 (BAT) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
6 kΩ ou plus |
|
C7-9 (CA3L) - F5-16 (BAT) |
| OK. | | REMPLACER L'ENSEMBLE DE CAPTEUR RADAR A ONDES MILLIMETRIQUES |
|
| 44. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT EN +B DANS LA LIGNE DE BUS CAN (CAMERA DE RECONNAISSANCE DE MARCHE AVANT - ENSEMBLE DE CAPTEUR RADAR A ONDES MILLIMETRIQUES) |
(a) Débrancher le connecteur N8 de la caméra de reconnaissance de marche avant.
(b) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(N8,F5) Cliquer sur Location & Routing(N8,F5) Cliquer sur Connector(N8) Cliquer sur Connector(N8) Cliquer sur Connector(F5) Cliquer sur Connector(F5)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
N8-10 (CA1P) - F5-16 (BAT) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
6 kΩ ou plus |
|
N8-9 (CA1N) - F5-16 (BAT) |
| NON OK | | REPARER OU REMPLACER LA LIGNE PRINCIPALE DE BUS CAN OU LE CONNECTEUR (CAMERA DE RECONNAISSANCE DE MARCHE AVANT - ENSEMBLE DE CAPTEUR RADAR A ONDES MILLIMETRIQUES) |
|
| 45. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT EN +B DANS LA LIGNE DE BUS CAN (CAMERA DE RECONNAISSANCE DE MARCHE AVANT - BORNE DE JONCTION CAN N° 3) |
(a) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(N8,F5) Cliquer sur Location & Routing(N8,F5) Cliquer sur Connector(N8) Cliquer sur Connector(N8) Cliquer sur Connector(F5) Cliquer sur Connector(F5)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
N8-2 (CA2P) - F5-16 (BAT) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
6 kΩ ou plus |
|
N8-1 (CA2L) - F5-16 (BAT) |
| OK. | | REMPLACER LA CAMERA DE DETECTION AVANT |
|
| 46. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT EN +B DANS LA LIGNE DE BUS CAN (CAMERA DE RECONNAISSANCE DE MARCHE AVANT - BORNE DE JONCTION CAN N° 3) |
(a) Débrancher le connecteur K100 de borne de jonction CAN n° 3.
(b) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(N8,F5) Cliquer sur Location & Routing(N8,F5) Cliquer sur Connector(N8) Cliquer sur Connector(N8) Cliquer sur Connector(F5) Cliquer sur Connector(F5)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
N8-2 (CA2P) - F5-16 (BAT) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
6 kΩ ou plus |
|
N8-1 (CA2L) - F5-16 (BAT) |
| OK. | | REMPLACER LA BORNE DE JONCTION CAN N° 3 |
| NON OK | | REPARER OU REMPLACER LA LIGNE SECONDAIRE CAN OU LE CONNECTEUR (CAMERA DE RECONNAISSANCE DE MARCHE AVANT - BORNE DE JONCTION CAN N° 3) |
| 47. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT DANS LES LIGNES DE BUS CAN (CONNECTEUR DE JONCTION CAN GLOBAL N° 15 - ECU DU PORTAIL D'ACCES CENTRAL (ECU DU PORTAIL D'ACCES AU RESEAU)) |
(a) Débrancher le connecteur K107 de jonction CAN global n° 15.
(b) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(K107) Cliquer sur Location & Routing(K107) Cliquer sur Connector(K107) Cliquer sur Connector(K107)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
K107-3 (CANH) - K107-14 (CANL) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
108 à 132 Ω |
| NON OK | | PASSER AU POINT 51 |
|
| 48. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT DANS LES LIGNES DE BUS CAN (CONNECTEUR DE JONCTION CAN GLOBAL N° 15 - CONNECTEUR DE JONCTION CAN GLOBAL N° 16) |
(a) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(K107) Cliquer sur Location & Routing(K107) Cliquer sur Connector(K107) Cliquer sur Connector(K107)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
K107-1 (CANH) - K107-12 (CANL) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
108 à 132 Ω |
| NON OK | | PASSER AU POINT 53 |
|
| 49. |
VERIFIER LE TYPE DE VEHICULE |
(a) Vérifier le type de véhicule.
Résultat:
|
Résultat | Passer au point |
|---|---|
|
Avec système d'aide au stationnement intuitif |
A |
| Sans système d'aide au stationnement intuitif |
B |
| B |
| REMPLACER LE CONNECTEUR DE JONCTION CAN GLOBAL N° 15 |
|
| 50. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT DANS LES LIGNES DE BUS CAN (CONNECTEUR DE JONCTION CAN GLOBAL N° 15 - ENSEMBLE D'ECU D'AVERTISSEMENT DE DISTANCE) |
(a) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(K107) Cliquer sur Location & Routing(K107) Cliquer sur Connector(K107) Cliquer sur Connector(K107)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
K107-2 (CANH) - K107-13 (CANL) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
200 Ω ou plus |
| OK. | | REMPLACER LE CONNECTEUR DE JONCTION CAN GLOBAL N° 15 |
| NON OK | | PASSER AU POINT 52 |
| 51. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT DANS LES LIGNES DE BUS CAN (CONNECTEUR DE JONCTION CAN GLOBAL N° 15 - ECU DU PORTAIL D'ACCES CENTRAL (ECU DU PORTAIL D'ACCES AU RESEAU)) |
(a) Débrancher le connecteur F38 de l'ECU du portail d'accès central (ECU du portail d'accès au réseau).
(b) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(K107) Cliquer sur Location & Routing(K107) Cliquer sur Connector(K107) Cliquer sur Connector(K107)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
K107-3 (CANH) - K107-14 (CANL) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
1 MΩ ou plus |
| OK. | | REMPLACER L'ECU DU PORTAIL D'ACCES CENTRAL [ECU DU PORTAIL D'ACCES AU RESEAU] |
| NON OK | | REPARER OU REMPLACER LES LIGNES PRINCIPALES DE BUS CAN OU LE CONNECTEUR (CONNECTEUR DE JONCTION CAN GLOBAL N° 15 - ECU DU PORTAIL D'ACCES CENTRAL (ECU DU PORTAIL D'ACCES AU RESEAU)) |
| 52. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT DANS LES LIGNES DE BUS CAN (CONNECTEUR DE JONCTION CAN GLOBAL N° 15 - ENSEMBLE D'ECU D'AVERTISSEMENT DE DISTANCE) |
(a) Débrancher le connecteur K64 de l'ensemble d'ECU d'avertissement de distance.
(b) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(K107) Cliquer sur Location & Routing(K107) Cliquer sur Connector(K107) Cliquer sur Connector(K107)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
K107-2 (CANH) - K107-13 (CANL) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
1 MΩ ou plus |
| OK. | | REMPLACER L'ENSEMBLE D'ECU D'AVERTISSEMENT DE DISTANCE |
| NON OK | | REPARER OU REMPLACER LES LIGNES SECONDAIRES CAN OU LE CONNECTEUR (CONNECTEUR DE JONCTION CAN GLOBAL N° 15 - ENSEMBLE D'ECU D'AVERTISSEMENT DE DISTANCE) |
| 53. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT DANS LES LIGNES DE BUS CAN (CONNECTEUR DE JONCTION CAN GLOBAL N° 16 - CONNECTEUR DE JONCTION CAN GLOBAL N° 15) |
(a) Rebrancher le connecteur K107 de jonction CAN global n° 15.
(b) Débrancher le connecteur K108 de jonction CAN global n° 16.
(c) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(K108) Cliquer sur Location & Routing(K108) Cliquer sur Connector(K108) Cliquer sur Connector(K108)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
K108-5 (CANH) - K108-12 (CANL) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
108 à 132 Ω |
| NON OK | | REPARER OU REMPLACER LES LIGNES PRINCIPALES DE BUS CAN OU LE CONNECTEUR (CONNECTEUR DE JONCTION CAN GLOBAL N° 16 - CONNECTEUR DE JONCTION CAN GLOBAL Nº 15) |
|
| 54. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT DANS LES LIGNES DE BUS CAN (CONNECTEUR DE JONCTION CAN GLOBAL N° 16 - CONNECTEUR DE JONCTION CAN GLOBAL N° 17) |
(a) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(K108) Cliquer sur Location & Routing(K108) Cliquer sur Connector(K108) Cliquer sur Connector(K108)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
K108-1 (CANH) - K108-8 (CANL) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
108 à 132 Ω |
| NON OK | | PASSER AU POINT 58 |
|
| 55. |
VERIFIER LE TYPE DE VEHICULE |
(a) Vérifier le type de véhicule.
Résultat:
|
Résultat | Passer au point |
|---|---|
|
Avec système de moniteur d'angle mort |
A |
| Sans système de moniteur d'angle mort |
B |
| B |
| REMPLACER LE CONNECTEUR DE JONCTION CAN GLOBAL N° 16 |
|
| 56. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT DANS LES LIGNES DU BUS CAN (CONNECTEUR DE JONCTION CAN GLOBAL N° 16 - CAPTEUR DE MONITEUR D'ANGLE MORT DROIT (B)) |
(a) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(K108) Cliquer sur Location & Routing(K108) Cliquer sur Connector(K108) Cliquer sur Connector(K108)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
K108-3 (CANH) - K108-10 (CANL) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
200 Ω ou plus |
| OK. | | REMPLACER LE CONNECTEUR DE JONCTION CAN GLOBAL N° 16 |
|
| 57. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT DANS LES LIGNES DU BUS CAN (CONNECTEUR DE JONCTION CAN GLOBAL N° 16 - CAPTEUR DE MONITEUR D'ANGLE MORT DROIT (B)) |
(a) Débrancher le connecteur K53 du capteur de moniteur d'angle mort droit.
(b) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(K108) Cliquer sur Location & Routing(K108) Cliquer sur Connector(K108) Cliquer sur Connector(K108)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
K108-3 (CANH) - K108-10 (CANL) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
1 MΩ ou plus |
| OK. | | REMPLACER LE CAPTEUR DE MONITEUR D'ANGLE MORT DROIT (B) |
| NON OK | | REPARER OU REMPLACER LES LIGNES SECONDAIRES CAN OU LE CONNECTEUR (CONNECTEUR DE JONCTION CAN GLOBAL N° 16 - CAPTEUR DE MONITEUR D'ANGLE MORT GAUCHE (B)) |
| 58. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT DANS LES LIGNES DE BUS CAN (CONNECTEUR DE JONCTION CAN GLOBAL N° 17 - CONNECTEUR DE JONCTION CAN GLOBAL N° 16) |
(a) Rebrancher le connecteur K108 de jonction CAN global n° 16.
(b) Débrancher le connecteur K111 de jonction CAN global n° 17.
(c) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(K111) Cliquer sur Location & Routing(K111) Cliquer sur Connector(K111) Cliquer sur Connector(K111)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
K111-2 (CANH) - K111-13 (CANL) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
108 à 132 Ω |
| NON OK | | REPARER OU REMPLACER LES LIGNES PRINCIPALE DE BUS CAN OU LE CONNECTEUR (CONNECTEUR DE JONCTION CAN GLOBAL N° 17 - CONNECTEUR DE JONCTION CAN GLOBAL Nº 16) |
|
| 59. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT DANS LES LIGNES DE BUS CAN (CONNECTEUR DE JONCTION CAN GLOBAL N° 17 - ENSEMBLE DE CAPTEUR RADAR A ONDES MILLIMETRIQUES) |
(a) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(K111) Cliquer sur Location & Routing(K111) Cliquer sur Connector(K111) Cliquer sur Connector(K111)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
K111-1 (CANH) - K111-12 (CANL) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
108 à 132 Ω |
| NON OK | | PASSER AU POINT 63 |
|
| 60. |
VERIFIER LE TYPE DE VEHICULE |
(a) Vérifier le type de véhicule.
Résultat:
|
Résultat | Passer au point |
|---|---|
|
Avec système de moniteur de vision panoramique |
A |
| Sans système de moniteur de rétroviseur panoramique |
B |
| B |
| REMPLACER LE CONNECTEUR DE JONCTION CAN GLOBAL N° 17 |
|
| 61. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT DANS LES LIGNES DE BUS CAN (CONNECTEUR DE JONCTION CAN GLOBAL N° 17 - ECU D'AIDE AU STATIONNEMENT) |
(a) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(K111) Cliquer sur Location & Routing(K111) Cliquer sur Connector(K111) Cliquer sur Connector(K111)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
K111-3 (CANH) - K111-14 (CANL) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
200 Ω ou plus |
| OK. | | REMPLACER LE CONNECTEUR DE JONCTION CAN GLOBAL N° 17 |
|
| 62. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT DANS LES LIGNES DE BUS CAN (CONNECTEUR DE JONCTION CAN GLOBAL N° 17 - ECU D'AIDE AU STATIONNEMENT) |
(a) Débrancher le connecteur K62 de l'ECU d'aide au stationnement.
(b) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(K111) Cliquer sur Location & Routing(K111) Cliquer sur Connector(K111) Cliquer sur Connector(K111)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
K111-3 (CANH) - K111-14 (CANL) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
1 MΩ ou plus |
| OK. | | REMPLACER L'ECU D'AIDE AU STATIONNEMENT |
| NON OK | | REPARER OU REMPLACER LES LIGNES SECONDAIRES CAN OU LE CONNECTEUR (CONNECTEUR DE JONCTION CAN GLOBAL N° 17 - ECU D'AIDE AU STATIONNEMENT) |
| 63. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT DANS LES LIGNES DE BUS CAN (ENSEMBLE DE CAPTEUR RADAR A ONDES MILLIMETRIQUES - CONNECTEUR DE JONCTION CAN GLOBAL N° 17) |
(a) Rebrancher le connecteur K111 de jonction CAN global n° 17.
(b) Débrancher le connecteur C7 de l'ensemble de capteur radar à ondes millimétriques.
(c) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(C7) Cliquer sur Location & Routing(C7) Cliquer sur Connector(C7) Cliquer sur Connector(C7)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
C7-4 (CA2H) - C7-3 (CA2L) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
108 à 132 Ω |
| NON OK | | REPARER OU REMPLACER LES LIGNES PRINCIPALES DE BUS CAN OU LE CONNECTEUR (ENSEMBLE DE CAPTEUR RADAR A ONDES MILLIMETRIQUES - CONNECTEUR DE JONCTION CAN GLOBAL N° 17) |
|
| 64. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT DANS LES LIGNES DE BUS CAN (ENSEMBLE DE CAPTEUR RADAR A ONDES MILLIMETRIQUES - CAMERA DE RECONNAISSANCE DE ZONE AVANT) |
(a) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(C7) Cliquer sur Location & Routing(C7) Cliquer sur Connector(C7) Cliquer sur Connector(C7)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
C7-10 (CA3H) - C7-9 (CA3L) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
108 à 132 Ω |
| OK. | | REMPLACER L'ENSEMBLE DE CAPTEUR RADAR A ONDES MILLIMETRIQUES |
|
| 65. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT DANS LES LIGNES DE BUS CAN (CAMERA DE RECONNAISSANCE DE MARCHE AVANT - ENSEMBLE DE CAPTEUR RADAR A ONDES MILLIMETRIQUES) |
(a) Rebrancher le connecteur C7 de l'ensemble de capteur radar à ondes millimétriques.
(b) Débrancher le connecteur N8 de la caméra de reconnaissance de marche avant.
(c) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(N8) Cliquer sur Location & Routing(N8) Cliquer sur Connector(N8) Cliquer sur Connector(N8)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
N8-10 (CA1P) - N8-9 (CA1N) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
108 à 132 Ω |
| NON OK | | REPARER OU REMPLACER LES LIGNES PRINCIPALES DE BUS CAN OU LE CONNECTEUR (CAMERA DE RECONNAISSANCE DE MARCHE AVANT - ENSEMBLE DE CAPTEUR RADAR A ONDES MILLIMETRIQUES) |
|
| 66. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT DANS LES LIGNES DE BUS CAN (CAMERA DE RECONNAISSANCE DE MARCHE AVANT - BORNE DE JONCTION CAN N° 3) |
(a) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(N8) Cliquer sur Location & Routing(N8) Cliquer sur Connector(N8) Cliquer sur Connector(N8)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
N8-2 (CA2P) - N8-1 (CA2L) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
200 Ω ou plus |
| OK. | | REMPLACER LA CAMERA DE DETECTION AVANT |
|
| 67. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT DANS LES CABLES DE BUS CAN (CAMERA DE RECONNAISSANCE DE MARCHE AVANT - BORNE DE JONCTION CAN N° 3) |
(a) Débrancher le connecteur K100 de borne de jonction CAN n° 3.
(b) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(N8) Cliquer sur Location & Routing(N8) Cliquer sur Connector(N8) Cliquer sur Connector(N8)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
N8-2 (CA2P) - N8-1 (CA2L) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
1 MΩ ou plus |
| OK. | | REMPLACER LA BORNE DE JONCTION CAN N° 3 |
| NON OK | | REPARER OU REMPLACER LES LIGNES SECONDAIRES CAN OU LE CONNECTEUR (CAMERA DE RECONNAISSANCE DE MARCHE AVANT - BORNE DE JONCTION CAN N° 3) |
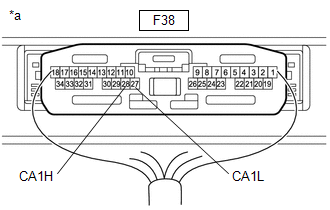
| 68. |
RECHERCHER UNE EVENTUELLE COUPURE DANS LES LIGNES PRINCIPALES DE BUS CAN (ECU DU PORTAIL D'ACCES CENTRAL (ECU DU PORTAIL D'ACCES AU RESEAU)) |
(a) Débrancher le connecteur F38 de l'ECU du portail d'accès central (ECU du portail d'accès au réseau).
(b) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(F38) Cliquer sur Location & Routing(F38) Cliquer sur Connector(F38) Cliquer sur Connector(F38)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
F38-28 (CA1H) - F38-27 (CA1L) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
108 à 132 Ω |
| OK. | | REMPLACER L'ECU DU PORTAIL D'ACCES CENTRAL [ECU DU PORTAIL D'ACCES AU RESEAU] |
|
| 69. |
RECHERCHER UNE EVENTUELLE COUPURE DE CIRCUIT DANS LES LIGNES PRINCIPALES DE BUS CAN (CONNECTEUR DE JONCTION CAN GLOBAL N° 15 - ECU DU PORTAIL D'ACCES CENTRAL (ECU DU PORTAIL D'ACCES AU RESEAU)) |
(a) Rebrancher le connecteur F38 de l'ECU du portail d'accès central (ECU du portail d'accès au réseau).
(b) Débrancher le connecteur K107 de jonction CAN global n° 15.
(c) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(K107) Cliquer sur Location & Routing(K107) Cliquer sur Connector(K107) Cliquer sur Connector(K107)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
K107-3 (CANH) - K107-14 (CANL) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
108 à 132 Ω |
| NON OK | | REPARER OU REMPLACER LES LIGNES PRINCIPALES DE BUS CAN OU LE CONNECTEUR (CONNECTEUR DE JONCTION CAN GLOBAL N° 15 - ECU DU PORTAIL D'ACCES CENTRAL (ECU DU PORTAIL D'ACCES AU RESEAU)) |
|
| 70. |
RECHERCHER UNE EVENTUELLE COUPURE DE CIRCUIT DANS LES LIGNES PRINCIPALES DE BUS CAN (CONNECTEUR DE JONCTION CAN GLOBAL N° 15 - CONNECTEUR DE JONCTION CAN GLOBAL N° 16) |
(a) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(K107) Cliquer sur Location & Routing(K107) Cliquer sur Connector(K107) Cliquer sur Connector(K107)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
K107-1 (CANH) - K107-12 (CANL) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
108 à 132 Ω |
| OK. | | REMPLACER LE CONNECTEUR DE JONCTION CAN GLOBAL N° 15 |
|
| 71. |
VERIFIER L'ABSENCE DE COUPURE DANS LES LIGNES PRINCIPALES DE BUS CAN (CONNECTEUR DE JONCTION CAN GLOBAL N° 16 - CONNECTEUR DE JONCTION CAN GLOBAL N° 15) |
(a) Rebrancher le connecteur K107 de jonction CAN global n° 15.
(b) Débrancher le connecteur K108 de jonction CAN global n° 16.
(c) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(K108) Cliquer sur Location & Routing(K108) Cliquer sur Connector(K108) Cliquer sur Connector(K108)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
K108-5 (CANH) - K108-12 (CANL) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
108 à 132 Ω |
| NON OK | | REPARER OU REMPLACER LES LIGNES PRINCIPALES DE BUS CAN OU LE CONNECTEUR (CONNECTEUR DE JONCTION CAN GLOBAL N° 16 - CONNECTEUR DE JONCTION CAN GLOBAL Nº 15) |
|
| 72. |
RECHERCHER UNE EVENTUELLE COUPURE DE CIRCUIT DANS LES LIGNES PRINCIPALES DE BUS CAN (CONNECTEUR DE JONCTION CAN GLOBAL N° 16 - CONNECTEUR DE JONCTION CAN GLOBAL N° 17) |
(a) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(K108) Cliquer sur Location & Routing(K108) Cliquer sur Connector(K108) Cliquer sur Connector(K108)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
K108-1 (CANH) - K108-8 (CANL) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
108 à 132 Ω |
| OK. | | REMPLACER LE CONNECTEUR DE JONCTION CAN GLOBAL N° 16 |
|
| 73. |
RECHERCHER UNE EVENTUELLE COUPURE DE CIRCUIT DANS LES LIGNES PRINCIPALES DE BUS CAN (CONNECTEUR DE JONCTION CAN GLOBAL N° 17 - CONNECTEUR DE JONCTION CAN GLOBAL N° 16) |
(a) Rebrancher le connecteur K108 de jonction CAN global n° 16.
(b) Débrancher le connecteur K111 de jonction CAN global n° 17.
(c) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(K111) Cliquer sur Location & Routing(K111) Cliquer sur Connector(K111) Cliquer sur Connector(K111)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
K111-2 (CANH) - K111-13 (CANL) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
108 à 132 Ω |
| NON OK | | REPARER OU REMPLACER LES LIGNES PRINCIPALE DE BUS CAN OU LE CONNECTEUR (CONNECTEUR DE JONCTION CAN GLOBAL N° 17 - CONNECTEUR DE JONCTION CAN GLOBAL Nº 16) |
|
| 74. |
RECHERCHER UNE EVENTUELLE COUPURE DANS LES LIGNES PRINCIPALES DE BUS CAN (CONNECTEUR DE JONCTION CAN GLOBAL N° 17 - ENSEMBLE DE CAPTEUR RADAR A ONDES MILLIMETRIQUES) |
(a) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(K111) Cliquer sur Location & Routing(K111) Cliquer sur Connector(K111) Cliquer sur Connector(K111)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
K111-1 (CANH) - K111-12 (CANL) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
108 à 132 Ω |
| OK. | | REMPLACER LE CONNECTEUR DE JONCTION CAN GLOBAL N° 17 |
|
| 75. |
RECHERCHER UNE EVENTUELLE COUPURE DANS LES LIGNES PRINCIPALES DE BUS CAN (ENSEMBLE DE CAPTEUR RADAR A ONDES MILLIMETRIQUES - CONNECTEUR DE JONCTION CAN GLOBAL N° 17) |
(a) Rebrancher le connecteur K111 de jonction CAN global n° 17.
(b) Débrancher le connecteur C7 de l'ensemble de capteur radar à ondes millimétriques.
(c) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(C7) Cliquer sur Location & Routing(C7) Cliquer sur Connector(C7) Cliquer sur Connector(C7)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
C7-4 (CA2H) - C7-3 (CA2L) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
108 à 132 Ω |
| NON OK | | REPARER OU REMPLACER LES LIGNES PRINCIPALES DE BUS CAN OU LE CONNECTEUR (ENSEMBLE DE CAPTEUR RADAR A ONDES MILLIMETRIQUES - CONNECTEUR DE JONCTION CAN GLOBAL N° 17) |
|
| 76. |
RECHERCHER UNE EVENTUELLE COUPURE DANS LES LIGNES PRINCIPALES DE BUS CAN (ENSEMBLE DE CAPTEUR RADAR A ONDES MILLIMETRIQUES - CAMERA DE RECONNAISSANCE DE MARCHE AVANT) |
(a) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(C7) Cliquer sur Location & Routing(C7) Cliquer sur Connector(C7) Cliquer sur Connector(C7)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
C7-10 (CA3H) - C7-9 (CA3L) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
108 à 132 Ω |
| OK. | | REMPLACER L'ENSEMBLE DE CAPTEUR RADAR A ONDES MILLIMETRIQUES |
|
| 77. |
RECHERCHER UNE EVENTUELLE COUPURE DANS LES LIGNES PRINCIPALES DE BUS CAN (CAMERA DE RECONNAISSANCE DE MARCHE AVANT - ENSEMBLE DE CAPTEUR RADAR A ONDES MILLIMETRIQUES) |
(a) Rebrancher le connecteur C7 de l'ensemble de capteur radar à ondes millimétriques.
(b) Débrancher le connecteur N8 de la caméra de reconnaissance de marche avant.
(c) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(N8) Cliquer sur Location & Routing(N8) Cliquer sur Connector(N8) Cliquer sur Connector(N8)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
N8-10 (CA1P) - N8-9 (CA1N) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
108 à 132 Ω |
| NON OK | | REPARER OU REMPLACER LES LIGNES PRINCIPALES DE BUS CAN OU LE CONNECTEUR (CAMERA DE RECONNAISSANCE DE MARCHE AVANT - ENSEMBLE DE CAPTEUR RADAR A ONDES MILLIMETRIQUES) |
|
| 78. |
RECHERCHER UNE EVENTUELLE COUPURE DE CIRCUIT DANS LES LIGNES PRINCIPALES DE BUS CAN (CAMERA DE RECONNAISSANCE DE MARCHE AVANT - BORNE DE JONCTION CAN N° 3) |
(a) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(N8) Cliquer sur Location & Routing(N8) Cliquer sur Connector(N8) Cliquer sur Connector(N8)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
N8-2 (CA2P) - N8-1 (CA2L) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
108 à 132 Ω |
| OK. | | REMPLACER LA CAMERA DE DETECTION AVANT |
|
| 79. |
RECHERCHER UNE EVENTUELLE COUPURE DANS LES LIGNES PRINCIPALES DE BUS CAN (BORNE DE JONCTION CAN N° 3) |
(a) Rebrancher le connecteur N8 de caméra de reconnaissance de marche avant.
(b) Débrancher le connecteur K100 de borne de jonction CAN n° 3.
(c) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
Cliquer sur Location & Routing(K100) Cliquer sur Location & Routing(K100) Cliquer sur Connector(K100) Cliquer sur Connector(K100)|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
K100-3 (CANH) - K100-2 (CANL) |
Câble débranché de la borne négative (-) de la batterie auxiliaire |
108 à 132 Ω |
| OK. | | REMPLACER LA BORNE DE JONCTION CAN N° 3 |
| NON OK | | REPARER OU REMPLACER LES LIGNES PRINCIPALES DE BUS CAN OU LE CONNECTEUR (BORNE DE JONCTION CAN N° 3 - CAMERA DE RECONNAISSANCE DE MARCHE AVANT) |
 Mode d'arrêt de communication d'ECU de contrôle de pression des pneus
Mode d'arrêt de communication d'ECU de contrôle de pression des pneus Vérifier ligne Bus 2
Vérifier ligne Bus 2Pose
POSE MESURE DE PRECAUTION / REMARQUE / CONSEIL
REMARQUE:
En cas de repose d'ECU de carrosserie principale (ECU de carrosserie du réseau multiplex), toujours la remplacer par un nouveau.
Avant de remplacer l'ECU de carrosserie principale (ECU de carrosserie de réseau multiplex), se repor ...
Pose
POSE MESURE DE PRECAUTION / REMARQUE / CONSEIL PIECES CONSTITUTIVES (REPOSE)
Procédure N° de référence
1 CABLE DE COMMANDE DE VERROUILLAGE DE CAPOT
53630D -
- -
2 ENSEMBLE DE SERRURE DE CAPOT AVEC CONTACTEUR D'ECLAIRAGE D'ACCUEIL ...
Depose
DEPOSE MESURE DE PRECAUTION / REMARQUE / CONSEIL
CONSEIL:
Procéder de la même façon pour le côté droit et pour le côté gauche.
La procédure suivante concerne le côté gauche.
MESURE DE PRECAUTION / REMARQUE / CONSEIL PIECES CONSTITUTIVES (DEPOSE)
Procédure N° de ...


.gif)